
Boston Dynamics. Бостон Дайнэмикс, роботы или имитация?
Автор: Xpath***
Статья
***
Предисловие автора
В этой статье использованы материалы Wiki, а также многое взято из статьи Алексея Градова (agradov), человека, реально работающего в области РОБОТЕХНИКИ и прекрасно знающего эту интересную сферу деятельности.
***
Когда-то давно, в школе, когда я узнал, что наш мозг используется всего на несколько процентов. 3 или 5. Или даже пусть 10% (это не те 10%, что упомянуты в фильме "Люси". LOL). Я помню, что подумал тогда.
А может мозт, то есть оставшиеся ~95%, как раз и занимается этими делами - синхронизаций работы внутренних органов, дыханием, шаганием?
Я уже знал о вегетативной нервной системе, и я пытался сделать шагающую игрушку.
Интернета тогда не было. В местной библиотеке, я ничего не нашел. Кое-что нарыл в Технике молодежи.
Но так ничего путного и не получилось.
Через много лет, я узнал о колоссальной сложности шагающего механизма. Постоянное перемещение квази-падающего объекта (шагая, мы все время падаем в направлении шагания) и о других подобных вещах.
Ведь мы срываем яблоко с дерева без особых усилий. Я уже и не говорю о спорте или военных навыках.
А обрабодка изображений в реальном времени. А анализ этой прорвы информации.
И этот список повседневных наших действий мы можем продолжать и продолжать.
И вот вопрос. А сколько же процентов мозга занято подобной деятельностью?
Потом, уже будучи студентом и проходя курс Теоретической Механики, я понял, что, хотя Теормех и логичен, но очень не прост.
И вот, по прошествии многих лет, мы услышали о Бостон Дайнемикс.
* * *

Boston Dynamics
Boston Dynamics — инженерная компания, специализирующаяся в робототехнике. Известна разработкой по заказу DARPA для военных целей четвероногого робота BigDog. Ранее компания работала по контракту с NAWCTSD над заменой обучающих видеороликов интерактивным компьютерным симулятором.
Президентом компании является Марк Райберт, который создал её в 1992 году на основе группы инженеров Массачусетского технологического института.

Ha фото Марк Райберт в центре в первом ряду.
Отрасль : робототехника
Продукция : Семейство роботов для DARPA
Число сотрудников : 300 чел.
Материнская компания : Hyundai Motor Company
Сайт: bostondynamics.com
Компания Boston Dynamics была куплена корпорацией Google Inc. в декабре 2013 года. В марте 2016 года Google решила продать Boston Dynamics, поскольку она вряд ли сможет выпустить коммерчески успешный продукт в ближайшие несколько лет.
9 июня 2017 года было объявлено, что владеющий поисковиком Google холдинг Alphabet продал разрабатывающие роботов компании Boston Dynamics и Schaft. Покупателем стала японская SoftBank — один из крупнейших мировых инвесторов в IT-бизнес, ранее отметившаяся многомиллиардным поглощением разработчика процессоров ARM.
В декабре 2020 года SoftBank договорилась о продаже Boston Dynamics корейскому автоконцерну Hyundai за $921 млн.
Роботы Boston Dynamics — это очень качественно выполненные проекты, демонстрирующие современный, сегодняшний уровень технологий из разных областей техники, объединённых в едином устройстве. А раз сегодняшний уровень, то и прорывом их называть затруднительно. Что до искусственного интеллекта, то и разработчики честно признают недостаток «интеллектуальности» своих роботов. Но за сами роботы компания получает от нас пятёрку с плюсом!
Далее цитата от "agradov":
"Ох уж этот так называемый «искусственный интеллект»! О нем будет отдельная публикация. Роботы не могут и никогда не смогут делать всё, как человек. И в этом есть положительный аспект. Потому что они никогда не поднимут восстание (как и ваш автомобиль, холодильник или автоответчик). Не займут все рабочие места (хотя бы потому, что их тоже должен кто-то разрабатывать и обслуживать). И уж если в XIX в. мы пережили внедрение ткацких станков, то тем более переживём внедрение роботов в веке XXI-м.
Почему-то русское национальное самокопание заставляет нас требовать от себя быть лучшими во всём. Вот непременно во всём, и без полутонов. А так в мире не бывает. Да, Boston Dynamics сейчас обшагала российских разработчиков в области шагающих роботов. Ну, так она и весь мир опередила, не только нас. Однако если у России, например, самый большой и современный в мире ледокольный флот; если Росатом, по сути, сегодня уже единственный в мире способен проектировать и строить современные АЭС (и вот такая плавучая АЭС есть только у нас одних); если современные российские комплексы вооружения на равных конкурируют с зарубежными аналогами на мировом рынке… То чего нам стесняться каких-то шагающих роботов? А вон немцы и японцы лучшие в автомобилестроении, станкостроении и промышленной робототехнике (хотя… и на эту тему ведь тоже можно спорить). А китайцы… Ну, и так далее."
Есть слухи в сети, что, видеоролики от Boston Dynamics — это имитация. Нет, это не имитация.
Но и ничего сверхъестественного роботы на них, и правда, не делают (повторим, речь о роликах именно от Boston Dynamics). Зато у американцев всё в порядке с юмором, и подшутить над коллегами они тоже любят. Это, например, про тех американцев, которые выступили под именем «Bosstown Dynamics» (найдите отличия в написании).
Именно они выпустили много шуточных роликов про роботов, наподобии роботов от Босто Дайнэмикс.
Примеры шуточных роликов:

* * *
В прежние времена все люди знали, что среди них есть волшебники, а мир полон чудес. И никто в этом не сомневался. Кто же такой маг? Да кто могёт, тот и маг!
С тех пор в человеческом сознании ничего не изменилось. Поменялся только язык. Сегодня магию инженеры называют словами «наука», «технологии» и «производство». И, да, все инженеры-робототехники во всех странах понимают, как устроены и как работают роботы от Boston Dynamics. Но для остальных людей они — прорыв, чудо техники… в общем, магия. Ведь так хочется поверить, что кусок железа с пластиком, смешно балансирующий на двух опорах за счёт согласованного движения гидроцилиндров, которые перемещает перекачиваемое насосом масло в соответствии с изменяющимися управляющими напряжениями на выходе коробочки с электронными платами, где по заданному программистами закону скачут электромагнитные поля, гоняя электроны через полупроводниковые p-n-переходы, — он вдруг ожил и вот ну всё-всё понимает! А там, глядишь, можно будет с ним выпить, да и поговорить по душам, как в фильме «Пассажиры»...
Если же мы присмотримся поближе к истории Boston Dynamics, то увидим… нет, не столько прорывы, сколько долгую, долгую, настойчивую, кропотливую, долгую… настойчивую… долгую работу. Начиная с созданной главой и вдохновителем компании Марком Рэйбертом в 1980 г. в Университете Карнеги — Меллона (Carnegie Mellon University, CMU) лаборатории Leg Lab, которая затем, в 1986 г. вслед за ним переехала в Массачусетский технологический институт (Massachusetts Institute of Technology, MIT).
Роботы лаборатории Leg Lab
Возможно, эти «3-мерный одноногий прыгун» (1983 – 1984 гг.), «Четвероног» (1984 – 1987 гг.), «Плоский двуног» (1985 – 1990 гг.) и «3-мерный двуног» (1989 – 1995 гг.), «Монопод» — одноног (1988 – 1989 гг.), «УнирУ» — одноногий кенгуру (1991 – 1993 гг.), «Упругая индейка» (1994 – 1996 гг.), «Дегенеробот» (1994 – 1995 гг.), «Краб» (с 1995 г.), «Робоп» (1996 – 1997 гг.), «Упругий фламинго» (1996 – 2000 гг.) показались вам смешными? Но именно они-то, скорее, и были прорывом для своего времени! Ведь как раз в них уже тогда были воплощены мировые научные достижения в части алгоритмов поддержания равновесия шагающими и прыгающими роботами. Все результаты публиковались в статьях, защищались диссертации — по приведённым ссылкам всё это можно найти. Да и не только в Leg Lab занимались этим направлением. Весь научный мир (и в нашей стране тоже) увлечённо развивал теорию и практику управления шагающими, бегающими и прыгающими механизмами.
Ниже приведена еще одна отличная цитата от agradov :
"Я не случайно так долго перечислял этих робочудиков. Да и то, назвал не всех, над которыми работала лаборатория (как с Марком Рэйбертом, так и после его ухода из лаборатории в 1995 г.). Честное слово, я белой завистью завидую инженерам из Leg Lab / Boston Dynamics, которые имели (и продолжают иметь) возможность вот уже четыре десятилетия (!) непрерывно работать и работать над тем, к чему они пришли. Тратить десятки миллионов долларов финансирования, которое лаборатория с 1980 г. получала от ARPA / DARPA и прочих военных на каждый из роботов, ни один (!) из которых так и не поступил в американскую армию. А если взять вообще все разработки, то только один робот (Spot) и только в 2019 г. Boston Dynamics робко начала продавать. О финансовом результате при таком раскладе, как говорится, либо хорошо, либо ничего, так что помолчим."
Для сравнения, многие (а правильнее сказать, большинство) учёные и инженеры в России в 1990-х гг., одновременно с научно-техническими вопросами, решали и немного другие, например: как прокормить семью на следующей неделе и куда для этого пойти подрабатывать — грузчиком на стройку или продавцом в ларёк? Или, как шутил один наш преподаватель в институте: «Работаем мы в другом месте, а учить студентов — это хобби». И только в 2010-х гг. Россия смогла хоть в какой-то степени вернуться к роботам (я имею в виду интерес на государственном уровне). Потому что в 2000-х гг. почти заново начинали работать многие промышленные предприятия (те, что дотянули), и их задачи в то время были связаны с первоочередными потребностями, обеспечивающими (не больше и не меньше) выживание страны. Несколько из таких направлений я перечислил выше, хотя их было гораздо больше. И это были не роботы.
Вот и получается, что лет 20 у России были полностью потеряны для робототехники. Это было как раз то время, когда Boston Dynamics дорешала научно-технические вопросы с шагающими роботами и приступила к созданию своих всемирно известных теперь робошедевров; когда нынешние гиганты в промышленной робототехнике, такие как, например, Fanuc и KUKA, становились этими самыми гигантами; когда современная компонентная база (без которой роботы остались бы вон теми «табуретками на верёвочках») — в частности, электронная — за рубежом миниатюризировалась, совершенствовалась и выходила на уровень массового производства и массовой же доступности.
Не стоит удивляться, что при более или менее сравнимых позициях в 1980-х гг. в начале 2010-х мы видим на той стороне уже крупные транснациональные концерны со сложившейся кооперацией, с которыми практически невозможно конкурировать на, к тому же, уже поделённых мировых рынках робототехники, а у нас… отдельных энтузиастов и отсутствующую отечественную компонентную базу.
Это отвлечение — специально для любителей сравнивать робота Фёдора от НПО «Андроидная техника» с роботом Atlas. Конечно, нет железной уверенности, что, не держи нас семеро, мы бы всем показали робототехническую кузькину мать. Но ведь и сравнивать сапоги с пирожными по запаху — тоже некорректно!
К тому же, в профессиональной — научной и инженерной — среде принято с уважением относиться к коллегам. В конце концов, все работают на одном поле и все друг у друга чему-то учатся. И кто-то обязательно будет лучшим. Это вовсе не означает, что у остальных нет достижений. Они есть, и любое достижение достойно уважения. А категоричны в суждениях обычно дилетанты.
Лучше мы попробуем понять общие инженерные подходы к построению таких сложных динамических систем: как сделать так, чтобы это всё заработало. Тогда читателю будет от чего оттолкнуться и при желании разобраться подробнее.
Кинематика и динамика
В робототехнике находят применение две группы методов построения систем управления. Первый подход основан на классической теории автоматического управления (ТАУ). Проблемой управления в данном подходе является определение (подразумевающее и математическое описание) законов управления, позволяющих достичь желаемого динамического отклика механизма. Механизм представляется здесь как цепь из твёрдых тел, связанных сочленениями, которые соответствуют его степеням свободы.
Желаемое движение механизма удобно задавать в некоторой базовой системе координат (например, в декартовой) — в той, в которой задаются координаты и всех остальных объектов окружающего мира. Управление же механизмом осуществляется в пространстве обобщённых координат, связанных с его сочленениями, которые приводятся в движение приводами. Поэтому вначале выполняется пересчёт известного желаемого движения из базовых координат в обобщённые (в координаты степеней свободы механизма), т.е. решается обратная задача кинематики.

Базовая система координат {B} и обобщённые углы θi (вращение вокруг осей zi) на примере робота PUMA. Взято отсюда
В пространстве обобщённых координат желаемое движение представляет собой, в терминологии систем автоматического управления, совокупность задающих воздействий для приводов механизма. Расчёт и выдачу согласованных заданий на приводы осуществляет система управления верхнего уровня — она выполняет общее управление движением. Системы управления приводов — нижнего уровня (принципы построения которых и изучает ТАУ), — отрабатывая задание, таким образом, с большей или меньшей точностью реализуют желаемое движение.

Типовая система управления привода. Взято отсюда
В задачах управления в робототехнике повсеместно применяются имитационные модели объекта управления — механической части робота. Теоретическим базисом для их построения является теоретическая механика (раздел «динамика твёрдого тела»), основанная на ньютоновской (классической) механике. Здесь уже речь идёт о задачах динамики (прямой и обратной). Решаются они обычно при помощи дифференциальных уравнений с использованием методов Лагранжа — Эйлера или Ньютона — Эйлера (хотя есть и другие методы). Для тех, кто хочет познакомиться с этими методами, так сказать, «пощупать их руками», могу посоветовать взять, для начала, первый из них, базирующийся на уравнениях Лагранжа второго рода. Пример решения прямой задачи динамики для несложной системы твёрдых тел с подробным понятным разбором приведён вот здесь.
Алгоритмы, разрабатывавшиеся в Leg Lab и в Boston Dynamics, судя по публикациям, используют комбинацию обоих подходов, учитывая тот факт, что шагающим роботам не очень важна точность движений. Их задачи выглядят примерно так: «дойти из точки A в точку B, избегая падений», — а как конкретно они это делают, пользователя обычно не волнует. Это отличает их от промышленных манипуляторов, которые, работая на производстве, должны обеспечивать субмиллиметровые точности при позиционировании и движении по заданным траекториям.
Симуляция BigDog при отработке алгоритмов движения
В статьях сотрудников лаборатории описывается так называемое интуитивно понятное управление (intuitive control). Данный подход позволяет им использовать для всех шагающих роботов примерно такие относительно простые законы управления:
высота подскока регулируется подачей энергии в приводы «ноги» в момент, когда она полностью сжата;
управление ориентацией «тела» осуществляется за счёт привода «бедра» в фазах установки «ноги» на поверхность;
поддержание равновесия, а также управление скоростью осуществляется за счёт установки «ноги» в точку симметрии, либо позади неё (для разгона) или впереди (для торможения).
Также предлагается идея виртуальных приводов, позволяющая управлять не по отдельности каждым реально существующим приводом (например, приводами «лодыжек», «колен», «бёдер» в их обобщённых координатах), а несуществующими, зато интуитивно понятными приводами (например, движений «тела» в декартовых координатах).
Ещё один интересный и новый на тот момент подход, исследовавшийся в лаборатории, касается управления существенно гибкими исполнительными механизмами. В альтернативу традиционному подходу к конструированию промышленных манипуляторов: «чем жёстче, тем лучше», — рассматривается поиск некоторого компромисса в вопросе жёсткости конструкций робота. С целью реализации данной идеи и построения упругого привода (series elastic actuator) в последовательную цепь привода специально вводится упругий элемент. Гибкость звеньев рассматривается теперь не в качестве их нежелательного свойства — в этом случае говорят о податливости, — а как способ повышения стабильности и точности управления усилиями приводов (сводящий, фактически, управление по усилию к технически более простому управлению по координате), повышения устойчивости приводов к ударам, снижения вероятности повреждения окружающих объектов, а также как способ аккумулирования механической энергии.
Так что шагающие роботы Boston Dynamics не могут похвастаться точностью, достаточной, например, для сварки трубопроводов. Зато они успевают быстро решить, куда примерно поставить «ногу», чтобы не упасть на каждом текущем шаге, и эффективно используют упругие свойства своих неточных «конечностей», демонстрируя великолепную устойчивость при движении.
Тема динамического управления роботами практически бесконечная. Свои алгоритмы и методики придумывает и перепридумывает чуть ли не каждый разработчик. Здесь мы только показали, с чего можно начать разматывать эту ниточку.
Цитата : agradov
"В завершение темы отметим, что неправы те, кто считает видеоролики с роботом Atlas подделкой на том основании, что его ходьба и бег чересчур напоминают человеческие локомоторные движения. У роботов, мол, другие методы балансировки, и махи руками при ходьбе им не нужны. Биологи молодцы, что рассказали нам про локомоторные движения. Будем знать. Я же как инженер добавлю к этому, что законы механики — они не разбирают, кто вы: робот, гепард или обезьяна. Они просто действуют, редиски, и ничего тут не поделаешь! Пошла ваша правая нога вперёд — возникла даламберова сила инерции, которая тем более значительна, чем большее ускорение вы придали ноге, а в результате равная ей по величине сила противодействия отталкивает ваше тело с правой стороны назад, стремясь развернуть его вокруг точки опоры — левой ноги. И вы хоть тресните, но либо компенсируйте её мышцами, либо выбрасывайте вперёд и что-нибудь слева (например… руку?) для балансировки. Да вы не верьте на слово, попробуйте сами побегать, прижав руки к бокам. Вам неудобно не размахивать руками не из-за рудиментарных цепей нейронов, запрограммированных почему-то на именно такие локомоторные движения. Наоборот, именно такие локомоторные движения «зашиты» в нейроны потому, что так удобнее передвигаться."
BigDog

Пара BigDog во время испытаний
BigDog — четвероногий робот, созданный в 2005 году совместно с Foster-Miller , Лабораторией реактивного движения и Гарвардским университетом. Финансирование программы шло через DARPA, которая ставила цель разработать вспомогательный роботизированный транспорт для сухопутных войск, способный передвигаться по сильнопересечённой местности. BigDog способен переносить до 150 кг груза со скоростью до 6,4 км/ч и преодолевать уклон до 35 градусов.
Аналогичной BigDog разработкой является Legged Squad Support Systems (LS3).
Spot
Spot — четвероногий робот, впервые представленный 23 июня 2016 года, способный развивать скорость до 1.6 м/сек. Робот осваивает местность с помощью стереокамер в сумме дающие угол обзора в 360°. Весит 25 килограмм, что делает его самым легким роботом на момент 2019 года.

CHEETAH

Cheetah — четвероногий робот, способный развивать скорость до 45,06 км/ч, что является рекордом для четвероногих роботов по состоянию на август 2012 года (прежний рекорд — 21,08 км/ч — был установлен в 1989 году). Разработка финансируется DARPA по программе Maximum Mobility and Manipulation.
Cheetah имеет гибкую «спину», которая помогает добиваться высокой скорости передвижения. К 2012 году был создан лабораторный образец робота, который передвигался по беговой дорожке, получая питание от стационарной гидравлической установки.
5 октября 2013 года была представлена версия робота, названная WildCat (рус. «Дикий кот»), действующая автономно.
LittleDog

LittleDog — небольшой четвероногий робот, созданный по заказу DARPA в исследовательских целях.
RiSE
RiSE —  шестиногий робот, способный карабкаться по вертикальным препятствиям: стенам, деревьям и оградам. Для передвижения использует ноги с микрозацепами и хвост, может менять позу в соответствии с кривизной поверхности. RiSE имеет длину 0.25 м и массу 2 кг. Скорость передвижения — 0,3 м/с.
шестиногий робот, способный карабкаться по вертикальным препятствиям: стенам, деревьям и оградам. Для передвижения использует ноги с микрозацепами и хвост, может менять позу в соответствии с кривизной поверхности. RiSE имеет длину 0.25 м и массу 2 кг. Скорость передвижения — 0,3 м/с.
Каждая нога робота управляется двумя электромоторами. Бортовой компьютер обеспечивает управление ногами, связь и обработку данных сенсоров.
Робот разработан в сотрудничестве с Пенсильванским университетом, Университетом Карнеги — Меллон, Калифорнийским университетом в Беркли, Стэнфордским университетом и Колледжем Льюиса и Кларка. Финансирование осуществляет DARPA.
PETMAN
PETMAN — двуногий робот, созданный для испытаний средств индивидуальной защиты. Первый антропоморфный робот, двигающийся как человек. Имеет множество технологических заимствований от BigDog.
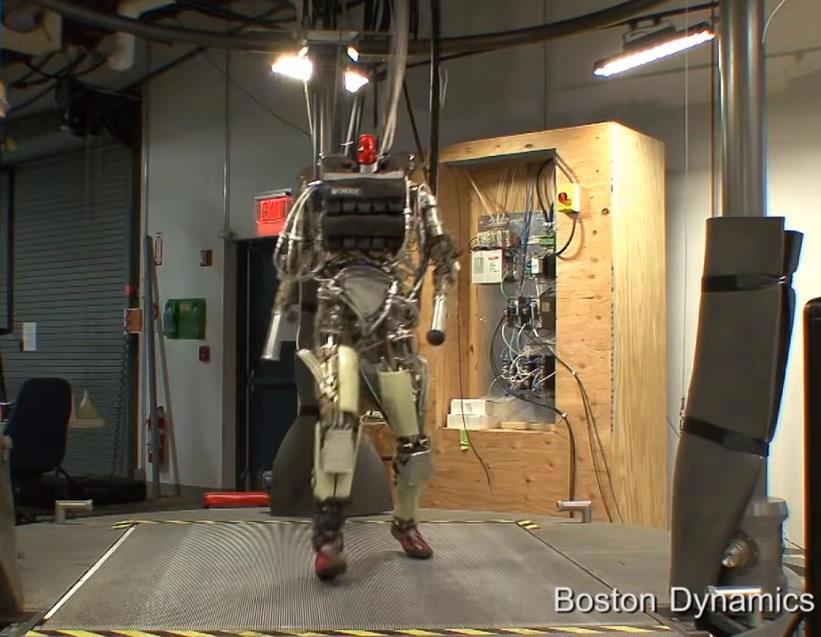
Atlas

Atlas во время испытаний, новое поколение.
Atlas — антропоморфный робот, предназначенный для передвижения по пересечённой местности. Ходит на двух ногах, может использовать свободные руки для переноса груза или при карабкании на вертикальные препятствия.
Handle

Handle — робот высотой около 2 метров, способный двигаться со скоростью до 4 м/с и прыгать в высоту на 1,2 метра. Отличительной особенностью робота является то, что на его задних ногах находятся колёса. Запаса батареи хватает на 24 км хода. Основатель Boston Dynamics Марк Райберт на презентации Handle перед инвесторами назвал его «роботом из ночных кошмаров».
Stretch

Stretch — робот, предназначенный для операций с коробками и ящиками в условиях ограниченного пространства. Его основная задача — работа в складских помещениях и разгрузка грузовиков. Заявленная производительность — перемещение за час 800 коробок весом до 23 килограмм без участия человека.
***
А это еще один переспективный образец робота с одним манипулятором

***
Цыплята и индюшки.


Ссылка на полную версию статьи Алексея Градова (agradov) :
https://habr.com/ru/post/507530/
***
Ссылки на некоторые видеоролики:

1. Atlas parkur (Атлас, паркур)
Новая версия:
2. Big Dog (Большая Собака): Ранняя версия
3. Big Dog (Большая Собака): Развитие
* * *
В заключении, хотел бы поделиться моим собственным общением с роботизированными игрушками в Японии.
Вполне себе адекватное поведение, обучаемость, конечно в небольшом диапазоне, но хозяина запоминает.
Веселые создания. Забываешь, что это все не более, чем имитация. LOL.



* * *
P.S. В статье использованы материалы Wiki и статьи "agradov".
* * *
P.P.S. Ссылка на первую книгу на сайте "Author Today":
https://author.today/work/158738
* * *
Ссылка на вторую книгу на сайте "Author Today":
https://author.today/work/160692
* * *
Ссылка на третью книгу на сайте "Author Today":
https://author.today/work/160794
* * *
Ссылка на четвертую книгу на сайте "Author Today":
https://author.today/work/160793
* * *