
Как работает зенитный ракетный комплекс СА-75 "Двина"?
Автор: Dilandu AlbatoДолжен честно признаться, что советский ЗРК СА-75 «Двина» долгое время оставался вне сферы моего интереса. Конечно, я знал о нем всю базовую информацию — ЗРК средней дальности, одноканальный, с командным наведением ракет — но как-то специфично его не выделял, и не думал, что в нем присутствуют какие-то особо оригинальные инженерные решения.
И, разумеется, оказался неправ)
Заинтересовавшись системой по несвязанному прямо с ней вопросу, я добыл (большое спасибо коллегам!) старый советский мануал, с некоторым усилием продрался через советский стиль написания мануалов... и с невероятным удивлением увидел перед собой чрезвычайно оригинальную, изящную и в некоторых аспектах действительно не имеющую аналогов систему. Решения, примененные советскими инженерами 1950-ых были красивы. Не все из них были оптимальны, но все они были обоснованы и формировали единую эстетику советской научно-технической школы.
И я решил рассказать о СА-75 более подробно. Тем более, что для меня он в определенной степени связан с семейной историей — мой отец в конце 1950-ых работал над обсчетом формы топливных шашек для их твердотопливных ускорителей.
В этой статье я не буду углубляться в детали истории или конструкции комплекса. Об этом написано множество работ людьми, которые знают о вопросе гораздо больше меня. Что я решил рассказать, так это как СА-75 работает.
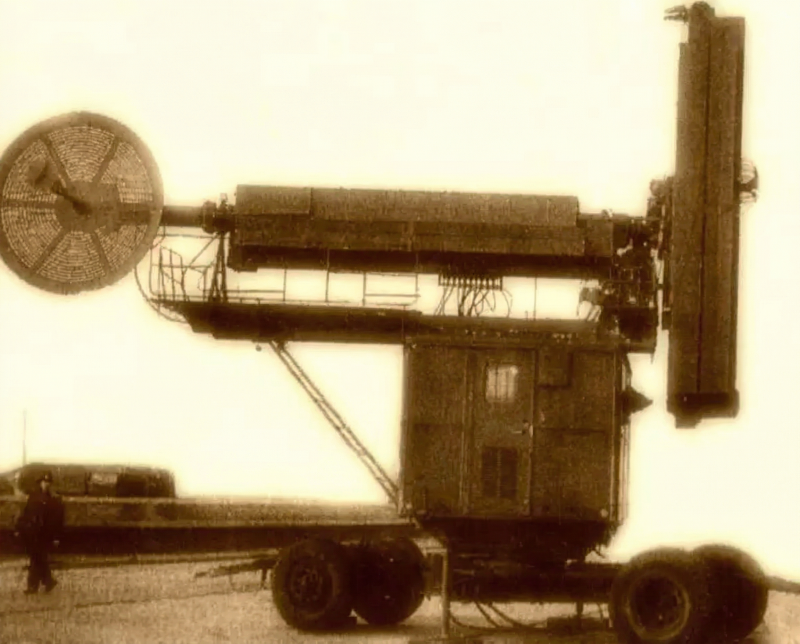
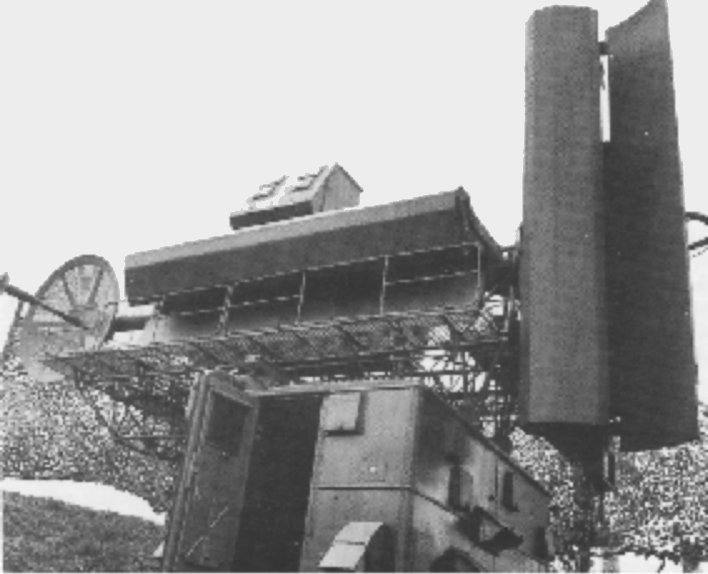
Это – кабина наведения радарного комплекса СНР-75 (Станция Наведения Ракет если что) ЗРК СА-75 «Двина», самой базовой модели. Довольно сложная конструкция, не так ли?
На ней мы видим:
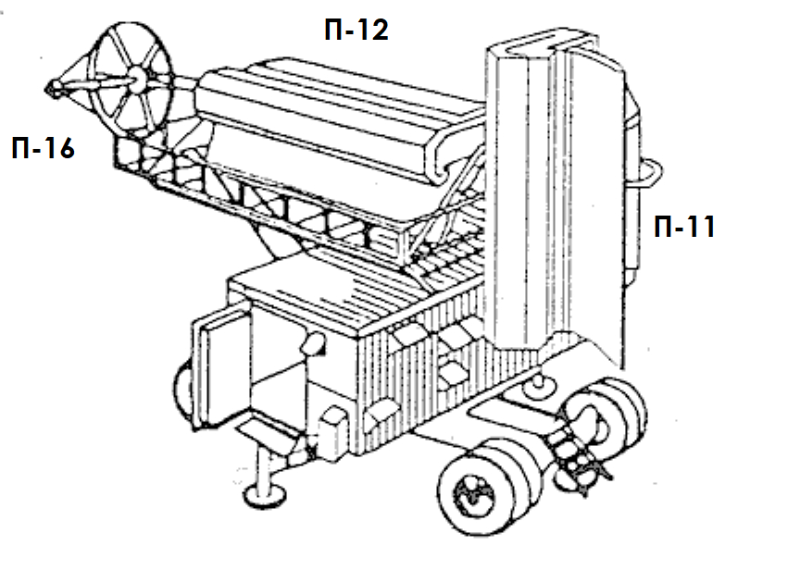
* Угломестная антенна П-11 – расположена вертикально на правой стороне кабины, предназначена для определения положения целей и ракет по углу места (то есть в вертикальной плоскости);
* Азимутальная антенна П-12 – расположена горизонтально на крыше кабины, предназначена для определения положения целей и ракет по азимуту (то есть в горизонтальной плоскости);
* Командная антенна П-16 – параболическая антенна на левой стороне кабины, предназначена для управления запущенными зенитными ракетами;
Такое оригинальное решение было выбрано в связи с желанием конструкторов реализовать в одном блоке сразу три функции – поиск целей, сопровождение целей и наведение ракет.
ПОИСК ЦЕЛИ:
Станция СНР-75 имеет отдельную антенну для сканирования в вертикальной плоскости (угломестная, П-11) и отдельную для сканирования в горизонтальной плоскости (азимутальная, П-12). Причем эти антенны, по сути, представляют собой два отдельных радара: питаются каждая от своего магнетрона, и работают на различных частотах. Сканирование в каждой плоскости ведется независимо, данные сопоставляются на выходе с антенн, что облегчает фильтрацию помех и затрудняет неприятелю противодействие.
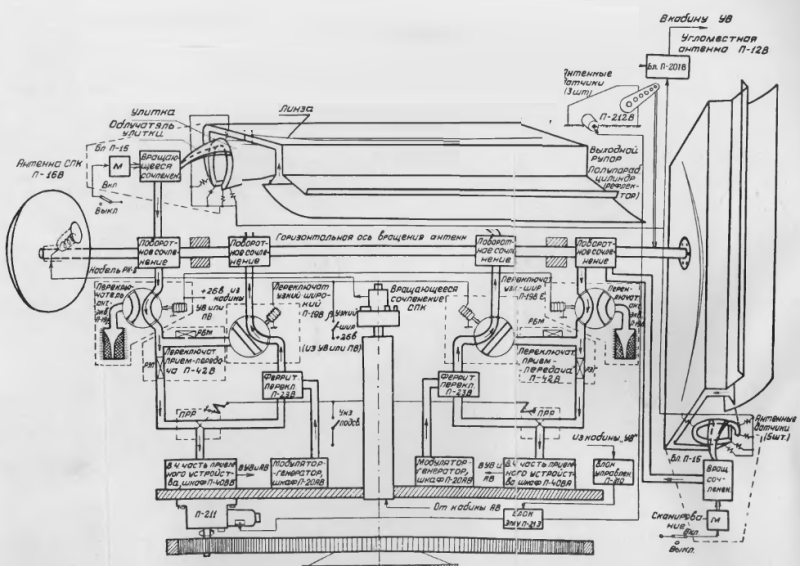
Схема устройства кабины. Сложная, не так ли?
Рассмотрим эти антенны повнимательнее. Тем более, что выглядят они весьма необычно. Услышав “радарная антенна” мы обычно представляем себе параболическую “тарелку”, или же вращающийся проволочный “матрац”. Но уж точно никак не прямоугольную коробку из листового металла, слегка напоминающую корыто с дверцами.
Такое необычное инженерное решение, однако, совершенно обосновано с точки зрения функциональности:
Прямоугольная форма антенны – вытянутая в плоскости сканирования и узкая в противоположной – позволяет ей формировать веерообразный луч, узкий в плоскости сканирования и широкий в противоположной. Луч горизонтальной (азимутальной) антенны узкий в горизонтальной плоскости, и широкий в вертикальной; луч вертикальной (угломестной) антенны, наоборот, узкий в вертикальной плоскости и широкий в горизонтальной. Такой веерообразный луч позволяет, с одной стороны, быстро сканировать значительный объем пространства, а с другой – определять положение целей в нем с приемлемой точностью.
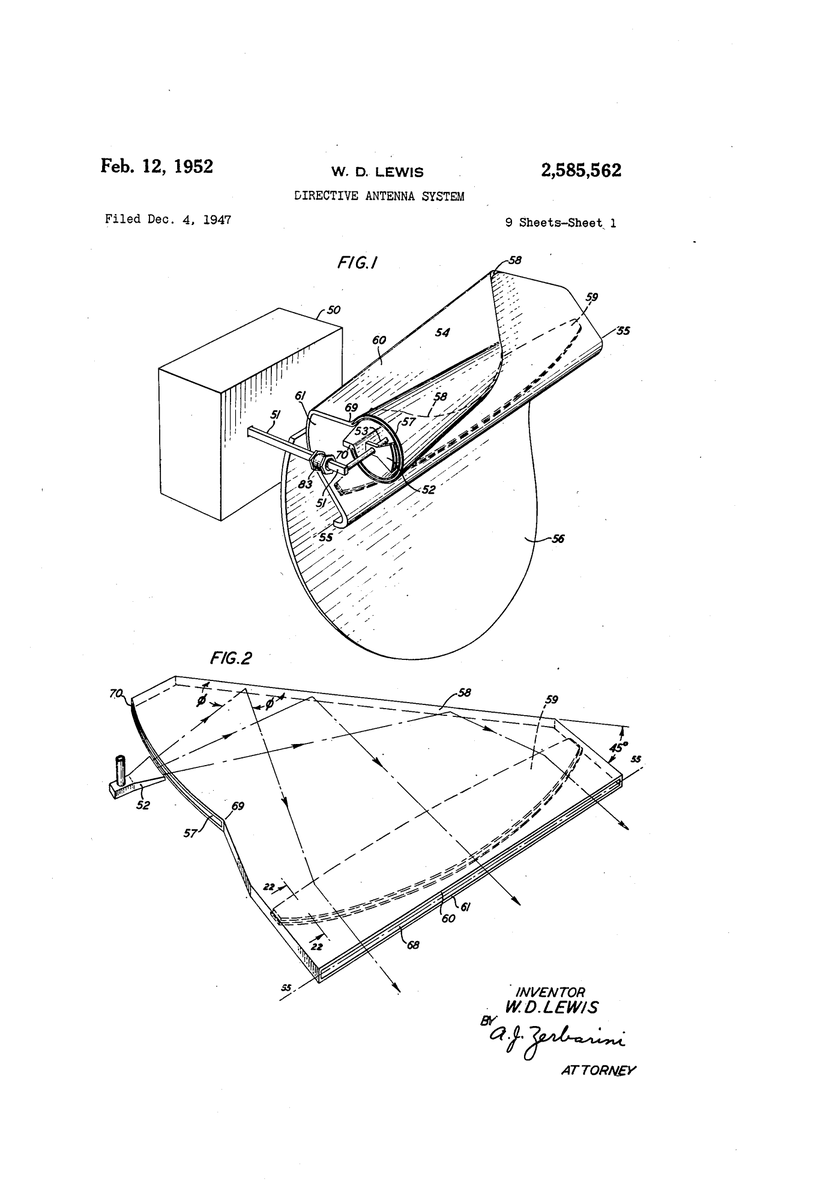
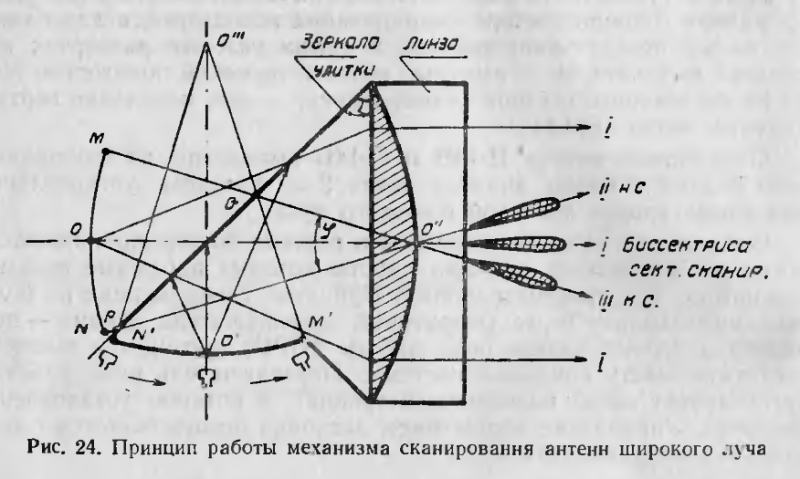
Для сканирования пространства лучом при неподвижной антенне используется так называемый сканер Льюиса (по имени американского инженера, придумавшего эту конструкцию в 1947 году). Не вдаваясь слишком в технические детали, этот сканер преобразует вращение рупора-облучателя (подающего на антенну электромагнитные волны от магнетрона) в равномерные движения радарного луча вдоль антенны. Для этого рупор-облучатель вращается внутри свернутого “улиткой” отражателя, раскрывающегося на основную антенну.
Фокусировка же луча – его преобразование из сферической волны в плоскую, идущую в нужном нам направлении – выполняется прохождением электромагнитной волны между плоскими параллельными листами металла, разделенными воздушным промежутком. Этот метод называется “металловоздушной линзой”.
Так как антенны у комплекса две, то сканирование ведется сразу двумя тщательно синхронизированными лучами – вертикальным и горизонтальным одновременно. Каждый луч имеет ширину в плоскости сканирования около 1 градуса, а ширину в перпендикулярной плоскости – около 6-8 градусов. Пробегая сектор примерно в 20 на 20 градусов впереди кабины с частотой 16 раз в секунду, горизонтально движущийся луч выдает информацию о положении целей в этом секторе по азимуту, а вертикально движущийся луч – по углу места. А так как оба луча также предоставляют (независимо друг от друга) информацию по расстоянию до целей, то сопоставить данные для операторов кабины не составляет труда.
Для визуализации данных, используются две вертикально расположенные катодно-лучевые трубки (англ. B-scope). На одной отображается картинка с горизонтальной антенны – о положении цели по азимуту. На другой, соответственно, с вертикальной – о положении цели по углу места. Оба дисплея также отображают дистанцию до цели, по удалению отметки цели от нижней границы экрана.

Контрольная панель СНР-75. Два серых прямоугольника в центре — азимутальный и угломестный индикаторы.
Первичные данные о воздушной цели, СНР-75 получает от внешних источников – обычно РЛС раннего обнаружения. Получив примерное направление на цель, высоту полета цели и дистанцию до нее, кабина разворачивается в соответствующем направлении и начинает поиск в секторе 20 на 20 градусов. Если данные о приближающейся цели недостаточно точные, чтобы обнаружить ее сразу, то кабина СНР-75 прокручивается на основании, плавно смещая сектор обзора.
СОПРОВОЖДЕНИЕ ЦЕЛИ:
Для выбора конкретной цели, кабина СНР-75 проворачивается на вращающемся основании до тех пор, пока цель не окажется точно в равносигнальной зоне азимутальной антенны П-12 – то есть прямо посередине области сканирования антенны. Отметка цели при этом оказывается точно на средней линии азимутальной катодно-лучевой трубки – так операторы понимают, когда достигли нужного положения.
(изображена экспортная модель, оснащенная кабиной оптического обнаружения и сопровождения цели)
После этого антенный комплекс проворачивается по вертикали (с помощью специального мотора, наклоняющего антенны вперед или назад) до тех пор, пока цель не окажется в равносигнальной зоне и угломестной антенны П-11. Аналогично, отметка цели при этом оказывается на середине угломестной катодно-лучевой трубки.
Теперь, после того как выбранная цель помещена в равносигнальную зону обеих антенн, на нее помещается строб (или “ворота”) по дальности. Говоря проще, задается промежуток между двумя дистанциями – с целью примерно посередине него – сигналы за пределами которого автоматика радара игнорирует. Если расстояние до цели изменяется, границы строба, соответственно, смещаются тоже.
Наконец, когда СНР-75 “ведет” выбранную цель по азимуту и углу места, и стробирует ее по дальности, эта выбранная цель “сопровождается” зенитным комплексом – пресловутый “radar lock”, хорошо известный любителям технотриллеров и игр-симуляторов – и данные о ее положении поступают в систему управления огнем. Собственно, смыслом всех этих операций было сфокусировать внимание теплой ламповой (в прямом смысле) автоматики 1950-ых на нужной нам цели.
Предусмотрены три режима сопровождения выбранной цели:
* Автоматический – автоматика СНР-75 самостоятельно удерживает выбранную цель в равносигнальной зоне как по азимуту, так и по углу места (доворачивая антенны так, чтобы сигнал от цели оставался совершенно одинаковым с обеих краев), и автоматически подстраивает строб по дальности, так, чтобы цель всегда оставалась точно в центре “ворот”.
Автоматическое сопровождение работает по довольно простой схеме. Если цель в равносигнальной зоне антенны, то каждое сканирование луча засекает цель точно посередине цикла сканирования (напоминаю, что продолжительность каждого цикла сканирования луча – 1/16 секунды, т.е. если цель в равносигнальной зоне, то она будет засекаться точно через 1/32 секунды после начала сканирования). Если же цель сместилась от равносигнальной зоны, то она, соответственно, будет сканироваться раньше или позже половины цикла сканирования, в зависимости от того, куда она сместилась. На основе этих данных, автоматика доворачивает антенну так, чтобы вернуть цель в
равносигнальную зону.
По аналогичному принципу работает и автоматическое стробирование по дальности. Дистанция до цели должна соответствовать ровно половине строба по дальности; если цель приближается или удаляется, то автоматика смещает границы строба.
* Ручной – операторы СНР-75 вручную удерживают выбранную цель в равносигнальной зоне, используя штурвалы ручного управления, чтобы держать антенны постоянно направленными на цель и по азимуту, и по углу места. Строб по дальности также подстраивается операторами вручную, его границы смещаются по мере изменения дистанции до цели;
* Полуавтоматический – автоматика СНР-75 удерживает выбранную цель по азимуту и углу места, но строб по дальности удерживается операторами вручную.
Этот режим был разработан в связи с тем, что постановка помехи по дальности была и остается одним из самых простых (и самых распространенных) методов радиоэлектронной борьбы. Станции РЭБ на самолете достаточно принять импульс неприятельского радара, и затем воспроизводить его с небольшой задержкой, так, чтобы вместо одного “эха” на радаре появилась целая цепочка. Автоматика 1950-ых справляться с такой помехой еще не умела и сопровождение по дальности срывалось.
НАВЕДЕНИЕ РАКЕТ:
После того, как цель взята на сопровождение, ее неплохо было бы обстрелять ракетами – в конце концов, ради этого же все и затевалось, не так ли?
Для отслеживания запущенных ракет используются те же антенны П-11 и П-12, что и для сопровождения цели. Это означает, что запущенные ракеты необходимо достаточно точно “вбросить” в сектор обзора антенн (напоминаю, 20 на 20 градусов). Иначе автоматика не сумеет взять их на сопровождение – отдельных антенн для отслеживания ракет у нее нет!

Поэтому пусковые установки зенитных ракет установлены на поворотных основаниях с сервоприводами, и связаны кабелями управления с кабиной СНР-75. Пусковые всегда ориентированы так, чтобы стартующие ракеты “вбрасывались” в сектор обзора кабины. Когда кабина поворачивается, следя за целью, пусковые установки поворачиваются в том же направлении.
Кабина СНР-75 имеет три отдельных аналоговых контура наведения ракет – то есть может наводить до трех ракет одновременно по одной цели. Такое количество считалось статистически необходимым, чтобы добиться высокой вероятности поражения цели – электроника 1950-ых считалась не слишком-то надежной, и инженеры предпочитали перестраховаться. Каждый контур отвечает за одну запущенную ракету: выделяет и обрабатывает данные о ее положении, сопоставляет их с данными о положении цели, вырабатывает курсовые команды для управления ракетой в полете.
Летящие ракеты выделяются из прочих целей по сигналам их транспондеров, отвечающих на идентификационные запросы (передаваемые антенной П-16). Каждый транспондер настроен на определенный режим работы, синхронизированный с одним из контуров наведения. Из всего массива данных, поступающих с азимутальной и угломестной антенн, каждый контур наведения выделяет сигнал транспондера “своей” ракеты, и игнорирует все остальное. Таким образом автоматика наведения ракет получает данные об их положении относительно кабины по азимуту и углу места.
При этом существует определенная проблема. Взлетевшую ракету необходимо “подхватить” на сопровождение и начать снабжать курсовыми командами возможно быстрее, иначе она может выскочить за пределы сектора обзора комплекса. Если искать ракету по координатам и стробировать по дальности теми же методами, что и цель, то это займет слишком много времени.
Для успешного “подхвата” летящих ракет, контуры наведения заранее – еще до пуска – задают для каждой ракеты широкий строб (шириной с весь сектор обзора антенн), смещающийся от комплекса с расчетной скоростью полета ракеты. Когда реальная ракета стартует, она совмещается с движущимся стробом, который затем “обжимается” вокруг сигнала ее транспондера. Такой метод позволяет подхватить ракету на автоматическое сопровождение значительно быстрее.
Существуют два основных метода наведения ракет комплекса на цель:
* Первый и самый простой метод – это так называемая “трехточка”. Запущенные ракеты просто удерживаются в той же самой равносигнальной зоне, что и цель, двигаясь вдоль условной прямой, соединяющей радар и цель. Метод называется “трехточкой”, потому что при нем три ключевые точки – радар, цель и ракета – находятся на одной соединяющей их прямой линии.
Простота этого метода очевидна: станция СНР-75 удерживает цель в равносигнальной зоне своих антенн, а ракеты командами приводятся к той же самой равносигнальной зоне. По сути, ракеты движутся вдоль условной линии, соединяющей СНР-75 и цель. Это делает “трехточку” очень простой в технической реализации, и требующей минимум данных о цели.
Однако при всех своих достоинствах, “трехточка”, это относительно неэффективный метод наведения. Ракета идет к цели по далеко не оптимальной траектории – ведь цель постоянно движется, а стало быть, линия визирования цели постоянно смещается тоже. И если цель не идет прямо на СНР-75, то итоговая траектория наводимой ракеты будет представлять собой вовсе не прямую, а довольно длинную дугу.
В результате, наводимая “трехточкой” ракета вынуждена, по сути, гнаться за целью, двигаясь при этом по неоптимальной траектории – что существенно сокращает ее эффективную дальность. Да и точность наведения этим методом оставляет желать много лучшего. Но этот метод прост в реализации и наименее подвержен неприятельским помехам.
* Второй метод – это наведение ракеты с упреждением. В этом случае ракета наводится не прямо в цель, а в рассчитанную автоматикой точку упреждения впереди цели.
Для расчета точки упреждения, автоматика СНР-75 определяет темпы изменения координат цели – азимута, угла места, и дальности – и на основании этих темпов вычисляет, каковы будут координаты цели спустя определенное время в будущем (разумеется, предполагая, что цель продолжит двигаться прежним курсом!). Необходимое время рассчитывается исходя из предполагаемого времени полета ракет на дальность нахождения цели.
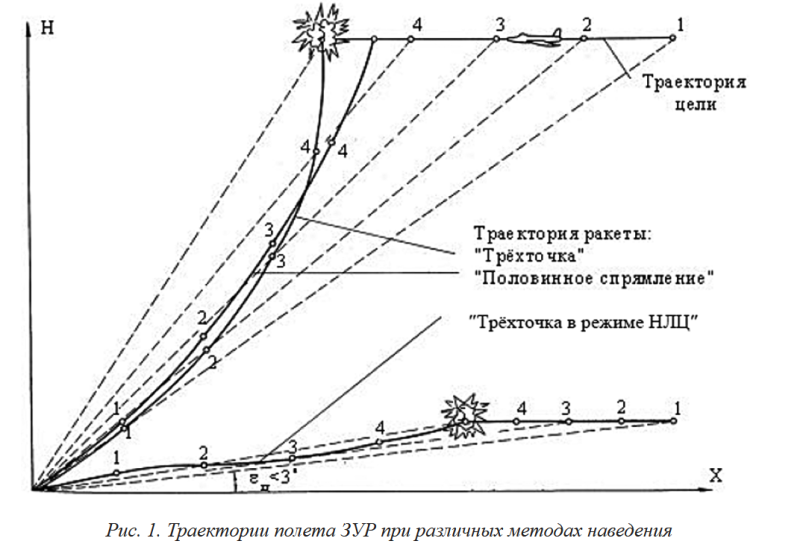
Вычисленные параметры упреждения подаются в контуры наведения ракет вместо реального положения цели. Для того, чтобы наведение ракеты было более плавным, эти параметры делятся пополам – то есть ракета реально летит по биссектрисе углов (по азимуту и углу места) между реальным положением цели и точкой упреждения цели. Такой метод называется “половинным спрямлением”; его применение позволяет дополнительно оптимизировать траекторию ракеты. По мере приближения ракеты к цели, траектория ее полета постепенно спрямляется и приводится к точке упреждения цели без “уполовинивания”.
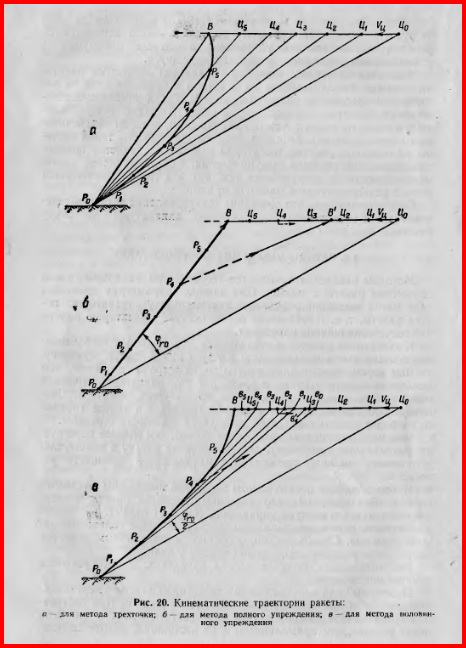
Сравнение траекторий при разных методах наведения. Видно, что половинное спрямление представляет собой оптимальный компромисс между длиной траектории и необходимостью маневров ракеты.
Метод наведения с упреждением существенно эффективнее “трехточки”. Ракета летит по оптимизированной траектории, более короткой, и в то же время более плавной, не требующей от ракеты слишком резких маневров для компенсации маневров цели. Наведение с упреждением также отличается большей точностью. Однако этот метод требует точного определения расстояния до цели – напомню еще раз, что радиопомеха “по дальности” является одной из самых базовых и простых в реализации! – и если цели удается помешать в этом, то наведение с упреждением не сможет работать.
УПРАВЛЕНИЕ РАКЕТАМИ:
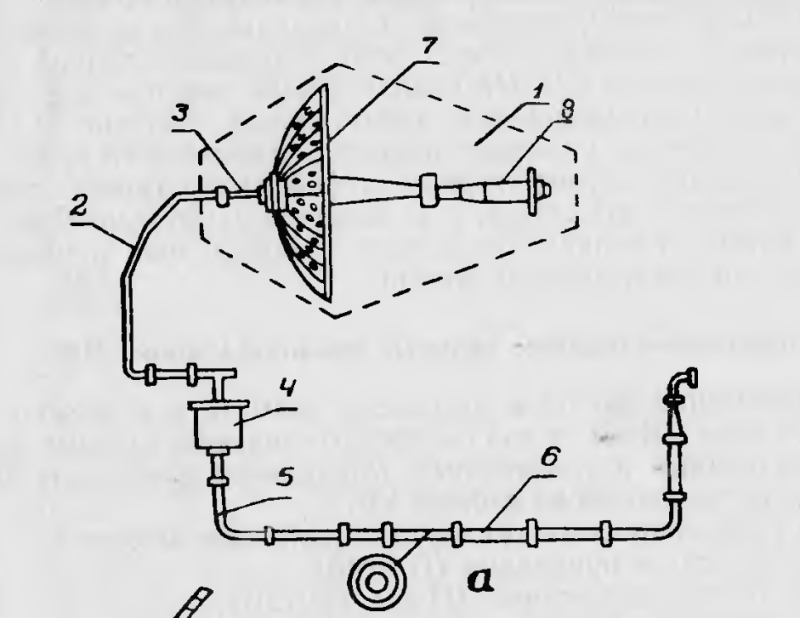
Летящие ракеты получают инструкции- куда лететь и что делать – от все той же станции СНР-75. Для передачи команд используется параболическая антенна П-16, формирующая узкий луч, перекрывающий с некоторым запасом 20-градусную зону сканирования азимутальной и угломестной антенн. Антенна закреплена неподвижно в одном комплексе с остальными и служит исключительно передатчиком.
Все команды ракетам передаются на общей частоте. Для того, чтобы каждая конкретная ракета могла идентифицировать обращенные именно ей команды (и проигнорировать прочие), все командные сигналы передаются в виде троек импульсов, с определенной длины промежутками между ними. Фильтры в приемниках ракет пропускают и усиливают только те сигналы, которые приходят с соответствующей кодовой тройкой.
Всего существует четыре типа команд:
* Идентификационная команда (сигнал запроса) – заставляющая сработать транспондер ракеты и дать немедленный ответ. Эта команда служит для идентификации конкретных ракет контурами наведения; получив команду запроса, ракета немедленно передает ответный сигнал, который воспринимают азимутальная и угломестная антенны. По положению ответного сигнала определяются координаты ракеты в горизонтальной и вертикальной плоскости, а по задержке ответного сигнала – точная дистанция до ракеты.
Идентификационный сигнал передается непрерывно, с частотой повторения 1840 Герц. Это единственная команда, которая не кодируется, так как является общей для всех ракет (а вот ответы транспондеров на нее уже разные).
* Управляющая команда – их две, для управления ракетой в двух взаимно перпендикулярных плоскостях (горизонтальной и вертикальной). Каждая команда управляет конкретной парой рулей ракеты, т.е. наведение в каждой плоскости осуществляется независимо от другой.
Управляющие команды передаются непрерывно в форме тактовых циклов (тактовых периодов) – временных отрезков определенной длины, задаваемых т.н. тактовыми сигналами, передаваемыми через строго определенные промежутки времени. Направление и величина поворота задается через положение командного сигнала в пределах командного цикла. Условно, для наведения в вертикальной плоскости:
- если командный сигнал подается строго посередине тактового цикла, это “нулевая” команда, и ракета остается на прежнем курсе;
- если командный сигнал подается ближе к началу тактового цикла, это команда “вверх”;
- если командный сигнал подается ближе к концу тактового цикла, это команда “вниз”;
Аналогично задается и управление в горизонтальной плоскости.
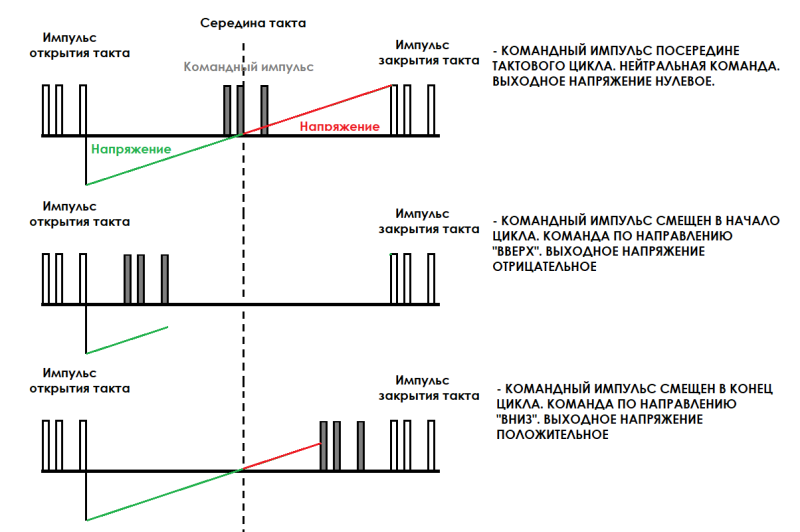
По положению командного сигнала относительно середины тактового цикла ракета понимает – в какую сторону ей отвернуть. А вот конкретная величина необходимого маневра (т.е. до какой степени ракете необходимо повернуть рули в том или ином направлении) зависит от того, насколько именно командный сигнал смещен относительно середины цикла.
Реализуется это через равномерно нарастающее опорное напряжение. С началом тактового цикла, на приемном контуре ракеты начинает равномерно повышаться напряжение – и нарастает до тех пор, пока приемник не получит командный сигнал, который останавливает рост напряжения и приказывает автоматике разрядить накопленный заряд в виде прямого или обратного тока (в зависимости от положения командного сигнала – см. выше). Условно, положительное напряжение на выходе означает, что ракете нужно свернуть вверх на величину, определяемую накопленным зарядом, а отрицательное –что надо свернуть вниз.
* Команда установки задержки радиовзрывателя – эта команда передается, когда ракета приближается к цели. Она команда устанавливает задержку срабатывания неконтактного взрывателя ракеты в зависимости от геометрии перехвата.
Например, если ракета перехватывает цель на встречном курсе, то задержка взрывателя выставляется минимальной – а то ракета рискует проскочить мимо. А вот если ракета догоняет убегающую цель, то задержку взрывателя наоборот, выставляют долгой – чтобы подрыв боевой части произошел поближе к цели а не далеко позади. Взрыватель боевой части ракеты имеет заданный радиус срабатывания в 50 метров, и задержка позволяет оптимизировать момент подрыва с той целью, чтобы взрыв произошел ближе к цели.
Команда установки задержки радиовзрывателя передается разово, в специально отведенный для нее промежуток времени в конце тактового цикла. Она представляет собой импульс положительного напряжения амплитудой 100-120 вольт и продолжительностью от 0,5 до 2 секунд. Продолжительность команды, собственно, и определяет величину задержки взрывателя.
* Команда взведения радиовзрывателя – эта команда передается всегда после команды установки задержки радиовзрывателя. Как нетрудно понять, она служит для активации радиовзрывателя ракеты при сближении с целью.
Момент передачи команды взведения радиовзрывателя определяется режимом наведения ракет. В режиме упреждения, радиовзрыватель включается, когда разница в удалении цели и ракеты от станции СНР-75 уменьшается до 300 метров. В режиме “трехточки” – если дистанцию между ракетой и целью точно измерить не получается – команда взведения поступает спустя 0,3 секунды после команды установки задержки.
Наличие специальной команды для активации радиовзрывателя связано со вполне логичным стремлением включить радиовзрыватель как можно ближе к цели. Ведь чем позднее включится радиовзрыватель, тем меньше у цели будет шансов попытаться заставить его сработать преждевременно шумовыми помехами, подавить приемник взрывателя сигналами в противофазе либо сбить с толку дипольными отражателями.
Команда взведения радиовзрывателя также передается разово, в специально отведенный для нее промежуток времени в конце тактового цикла. Она кодируется как короткий импульс отрицательного напряжения в 150 вольт.
По ряду данных, существовал также режим подрыва ракет по команде. Он использовался в тех случаях, когда применение радиовзрывателя было невозможно, или считалось нежелательным – например, при стрельбе по целям на малой высоте, когда взрыватель мог случайно среагировать на отражение его импульсов от рельефа.
МОДИФИКАЦИИ:
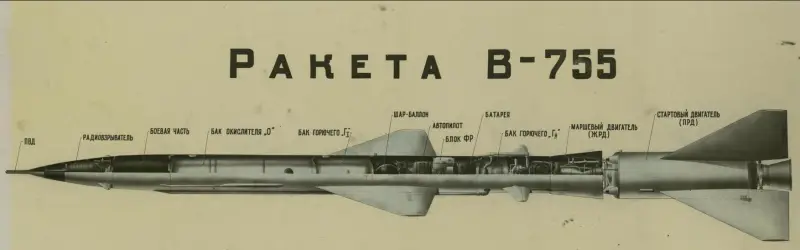
Выше мы рассмотрели самую исходную, самую базовую версию комплекса – СА-75 “Двина”. Но эта версия была не единственной, и даже не самой распространенной.
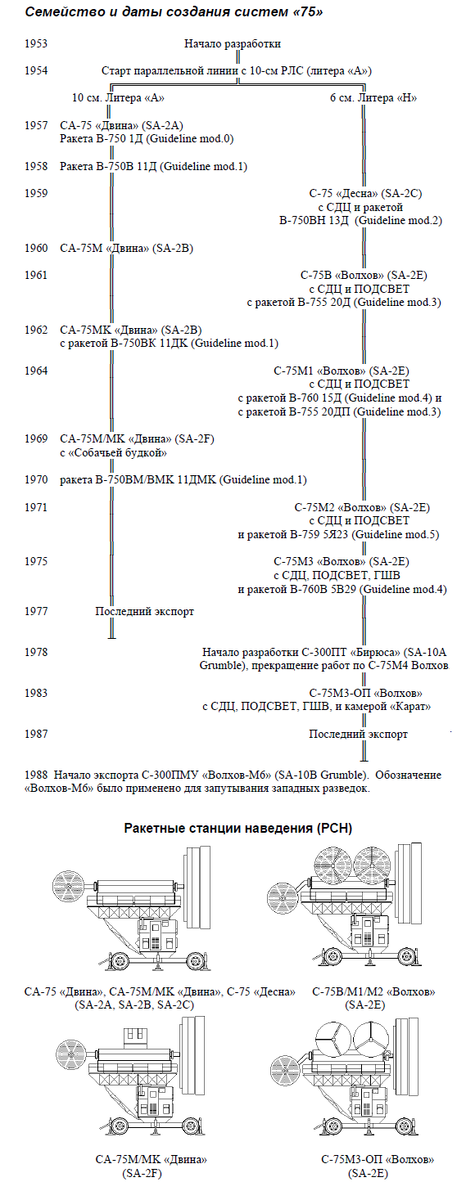
Фамильное древо ЗРК 75-ой модели. Правда, солидное? Нас интересует его левая ветвь — комплексы СА-75.
Значительной головной болью для семейства СА-75 “Двина” было сопровождение целей на малых высотах. Широкие лучи сканирующих антенн, постоянно задевали то холмы, то верхушки деревьев, то здания. Это создавало на индикаторах сильную фоновую засветку, способную замаскировать летящую на малой высоте цель.
Чтобы решить проблему, на некоторых поздних моделях внедрили систему селекции движущихся целей. Специальный контур проверял, смещена ли частота вернувшегося “эха” относительно исходного сигнала по Доплеру. Если Доплеровский сдвиг отсутствовал (например, от неподвижной цели), то такой сигнал подавлялся и не поступал на индикаторы. Если же эхо сигнала было смещено, то, стало быть, цель двигалась и выводилась на экраны.
Этот метод, однако, таил в себе изрядный подвох. Дело в том, что по Доплеровскому сдвигу можно определить только радиальную скорость цели – то есть скорость, с которой цель приближается или удаляется от радара. Если же дистанция от радара до цели не меняется (например, если цель облетает радар по дуге постоянного радиуса), то ее радиальная
скорость становится… верно, равной нулю. И радар, настроенный фильтровать неподвижные цели, сочтет ее неподвижной и отфильтрует.
Специально для атаки целей на малых высотах был также внедрен особый метод наведения, при котором управление ракетой по азимуту осуществлялось методом упреждения, а по углу места — «трехточкой» при фиксированном угле возвышения. Такой метод позволял «зафиксировать» высоту полета ракеты над поверхностью, не рискуя, что она может вследствие маневров цели «нырнуть в землю» (такого рода инциденты имели место во Вьетнаме, где американские пилоты быстро смекнули — перейдя в крутое пикирование на небольшой высоте, они заставляют автоматику СА-75 опустить точку упреждения под землю, и ракета нырнет в грунт)
Для улучшения противодействия помехам, были введены несколько технических мер. Во-первых, были введены широкополосные фильтры, позволявшие комплексу «отстроиться» от неприцельных фоновых помех. Во-вторых, магнетроны СНР-75 были доработаны для быстрого «перепрыгивания» с одной частоты на другую, если рабочая частота окажется забитой. В-третьих — были разработаны методики наведения комплекса в пассивном режиме на сами источники помех (что было не слишком сложно — ведь чтобы заглушить радар, станция постановки помех должна работать примерно в том же режиме!)

Война во Вьетнаме продемонстрировала, что СА-75 необходимо действовать и в сложной помехоопасной обстановке, в том числе и под непосредственной угрозой неприятельской атаки конкретно против комплексов — особенно с применением противорадарных ракет, наводящихся на излучение РЛС. Чтобы решить эту проблему, ряд экспортных моделей был снабжен кабиной оптического обнаружения/сопровождения цели. Установленная поверх азимутальной антенны (и метко прозванная «собачьей будкой») антенна размещала оптические дальномеры для визуального обнаружения и отслеживания цели; оператор кабины использовал штурвалы, чтобы удерживать цель на линии визирования.