
Автопилот на Марсе: как ИИ провёл «Настойчивость» по краю кратера
Автор: Антон Михайлов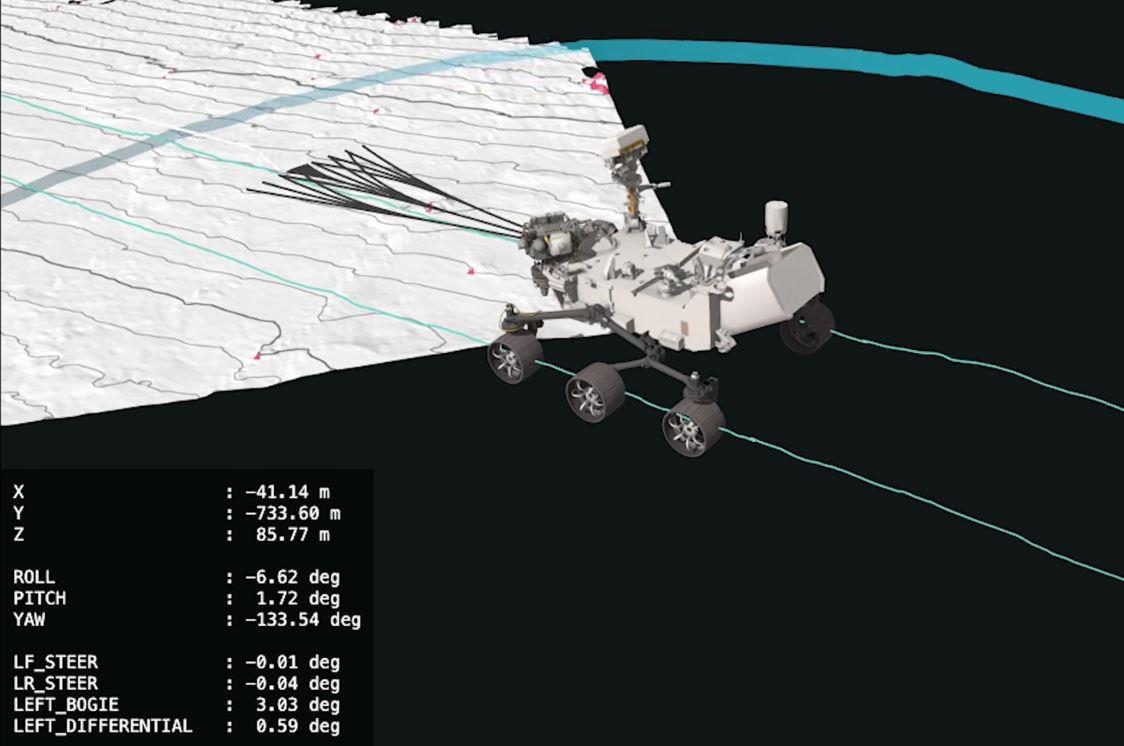 В декабре 2025 года марсоход NASA «Perseverance» совершил сложный 246-метровый путь по краю кратера Езеро, полагаясь не только на команды с Земли, но и на собственные «мозги». , созданная на основе данных с борта ровера, раскрывает процесс автономной навигации в действии.
В декабре 2025 года марсоход NASA «Perseverance» совершил сложный 246-метровый путь по краю кратера Езеро, полагаясь не только на команды с Земли, но и на собственные «мозги». , созданная на основе данных с борта ровера, раскрывает процесс автономной навигации в действии.
Как марсоход выбирает дорогу?
Перед сложным участком «Настойчивости» было предложено два маршрута. Первый, проложенный 8 декабря, — результат работы генеративного искусственного интеллекта. Этот ИИ проанализировал огромный массив данных: высокодетальные снимки с орбитального аппарата MRO, цифровые модели рельефа и выделил ключевые объекты — подстилающие породы, опасные валуны, песчаные дюны. На основе этого анализа система создала непрерывный путь с путевыми точками — своеобразными «дорожными знаками» для ровера.
Дорожная карта в реальном времени
Анимация показывает, что происходит уже во время движения:
- Бледно-голубые линии — это реальный след колёс.
- Ветвящиеся чёрные линии впереди — возможные пути, которые бортовой компьютер оценивает каждую секунду, сканируя местность стереокамерами.
- Белая поверхность под колёсами — не снег, а динамическая карта высот, которую марсоход строит сам по мере движения.
- Бледно-голубой круг в конце — достигнутая путевая точка, где ровер получает новые инструкции.
Зачем это нужно?
Автономность — ключ к выживанию и эффективности. Радиосигнал до Марса идёт от 5 до 20 минут, и операторы не могут дистанционно управлять каждым поворотом на сложной местности. Поэтому «Настойчивость» сама оценивает риски: объезжает крупные камни, избегает рыхлого песка и выбирает самый безопасный путь к заданной цели.
Эта технология не просто прокладывает маршруты. Она позволяет роверу совершать более длинные и продуктивные переходы, фокусируясь на главной цели миссии — поиске следов древней марсианской жизни.
Управляет миссией «Mars 2020 Perseverance» Лаборатория реактивного движения NASA (JPL).